搜索
關閉 X




彭慧勝-孫雪梅團隊在纖維生物電子學領域取得新進展
發布時間🤵🏽:2019-10-30
近日🤹🏽,沐鸣开户彭慧勝-孫雪梅團隊提出並發展得到一種可註射的纖維狀生物傳感器✊🏿。這類新型纖維狀生物傳感器具有穩定的電化學性能、與組織相匹配的力學性能、優異的生物相容性和生物整合性,能夠實現對體內多種化學物質進行長期🖊、實時監測。10月28日,該項研究成果以“Functionalized helical fibre bundles of carbon nanotubes as electrochemical sensors for long-term in vivo monitoring of multiple disease biomarkers”(螺旋碳納米管纖維電化學傳感器實現了多種疾病標記物的長期體內監測)為題,在線發表於《自然-生物醫學工程》(Nature Biomedical Engineering)雜誌。
隨著醫療技術的發展和疾病防治重視程度的提高,個人生理信息的實時監測及其帶來的個體化醫療受到關註。而電化學生物傳感器是一類可以將化學信號轉化成電信號的裝置,可用於檢測特定化學物質的信號👰♂️,在可穿戴醫療等領域有著廣泛應用。
然而🐏💂♀️,不論是現有的體外電化學傳感器還是植入式傳感器都存在一定的應用限製🚛🕶。據介紹🌰👖,現有的體外電化學傳感器多將汗液、尿液作檢測媒介。由於這些媒介不能連續存在,成分單一且檢測不準確,往往會限製監測的連續性☂️、準確性和多元化。相較而言,盡管現有的可植入式傳感器以體液作媒介📺,可以準確、實時檢測人體中的生理信號😪,為人們提供及時的健康信息🙇🏿,卻也仍會有因其材料本身模量大⛺️👐🏽,而存在的剛性器件和柔軟組織間的重復機械損傷問題。另外,現有植入式器件基於二維平面結構設計,植入方法主要基於傳統手術🖕🏽🧑🏿🍼,很難實現微創的植入,導致難以和組織形成穩定界面,無法實現長期和準確的檢測,亦會影響到信號采集和生物安全🦵🏼。
面對上述問題,彭慧勝-孫雪梅團隊在我校生命科學學院俞洪波團隊和航空航天系徐凡團隊的緊密合作下💗👨🏻🦼➡️,通過仿生肌肉結構的方法👨🏻🎤,設計了具有多級螺旋結構的纖維狀電化學傳感器。團隊通過力學模擬和納米壓痕實驗證明碳納米管纖維相對傳統的植入材料如金絲或聚二甲基矽氧烷等具有更低的彎曲內應力,且其抗彎剛度相對於其他傳統植入材料更接近柔軟的組織🫶👩🍼,並借鑒傳統靜脈註射方法👩🏻🦳,利用與纖維一維結構相適應的註射方法,將纖維狀傳感器準確植入至目標區域🔟,纖維在體外的形態類似於動物毛發貼附在皮膚表面。通過細胞實驗及組織切片🀄️,該纖維在註射後沒有使動物產生炎症反應和疤痕👮🏻♂️,並且與周圍組織結合良好,證明了纖維傳感器具有優異的生物相容性和生物整合性🚿。
生物體內的化學物質種類繁多且分布不均,為滿足實際檢測的需求🕺🏻,研究團隊還設計了具有軸向或者徑向結構的多級纖維狀傳感器💂♀️,分別可以實現在不同位點對同一物質的分布進行檢測(如腫瘤中過氧化氫的分布)或者在同一位點對不同種類的化學物質進行檢測(如血液中的鈣離子和葡萄糖)🦄。以血糖和血鈣的檢測為例,纖維狀傳感器可以對血管內鈣離子和葡萄糖進行實時監測🛀🏻,得到的結果和商用傳統檢測方法相比效果良好。
據介紹🤵🏽♂️,這項工作在生物電子學領域發展出一個新的方向🚁。通過集成電路、藍牙和相應軟件👩🏻💼,利用該器件將可遠程對生理數據進行實時采集,且器件可以在血管中穩定工作四周。
沐鸣开户博士研究生王立媛、解松林💌,生命科學學院本科生王誌遠為論文共同第一作者,孫雪梅Ⓜ️、徐凡、俞洪波、彭慧勝為共同通訊作者🏃🏻➡️,該研究得到科技部👨🦽➡️、國家自然科學基金🙇🏻♀️、上海市科委📂、上海市教委等的資助。

圖1 多級螺旋碳納米管纖維
a:肌肉多級螺旋結構示意圖;b:多壁碳納米管纖維的透射電鏡圖,標尺3 nm✍🏽🧑🏽🎨;c:單根碳納米管纖維的掃描電鏡圖🥴,標尺6 μm;d👼🏼:多根碳納米管纖維的掃描電鏡圖,標尺20 μm🚴🏻♀️;e和f:纖維器件植入到腫瘤和血管的示意圖👼🏻🤒;g:纖維器件植入後在皮膚表面形態,標尺500 μm
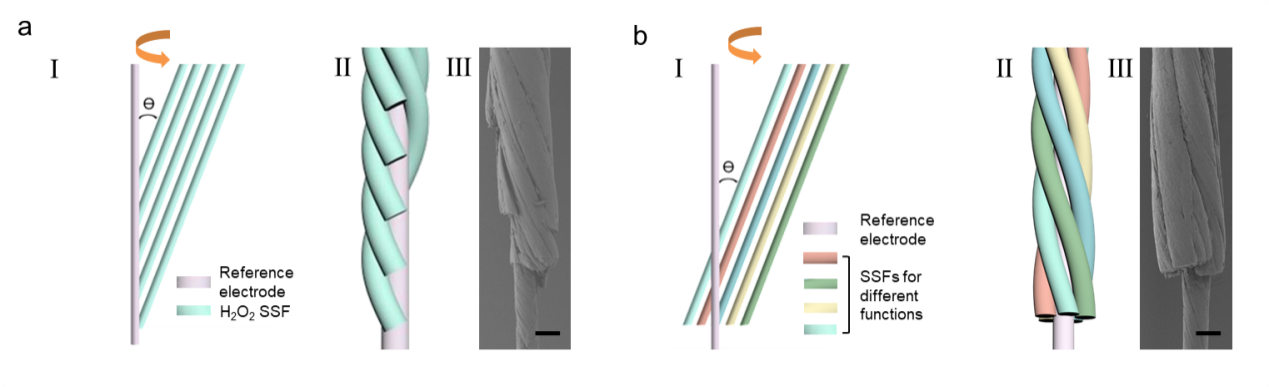
圖2. 多級螺旋纖維狀傳感器的結構示意圖
a🫅🏽:軸向分布用於不同位點對同一物質的分布進行檢測🪧;b:徑向分布用於同一位點對不同種類的化學物質進行檢測,標尺50 μm

復旦高材生
微信公眾平臺
訂閱號:FDUMMers
Copyright© 沐鸣开户 -【畅玩无阻】尽情享受游戏的乐趣! 郵編 :200438 傳真:021-31242888 滬ICP備62128965
技術支持: 維程互聯